Untuk membuat suatu sistem antena tracker berbasis GPS tidaklah terlalu sulit, hanya saja data yang kita butuhkan adalah informasi latitude, longitude , dan ditambah informasi altitude untuk mendapatkan hasil tracking 3D.
Sebagai contoh adalah menggunakan GPS dengan protokol NMEA, paket yang dibutuhkan berupa $GPRMC atau $GPGLL dimana di dalam paket ini terdapat informasi yang dibutuhkan (latitude dan longitude) serta $GPGGA yang berisi informasi altitude. untuk akurasi tracking, informasi dari GPS sudah cukup cukup baik untuk jarak tracking minimal 25-30 meter (Tergantung hardware GPS).
Jika masih kurang jelas tentang Protokol NMEA bisa dipahami pada link berikut :
Dari data diatas untuk mendapatkan data-data yang dibutuhkan saja maka dilakukan parsing atau pemecahan data berdasarkan header ataupun dengan teknik menghitung byte serta panjang data. kemudian capture bagian yang dibutuhkan.
Setelah mendapat informasi latitude, longitude, dan altitude, kemudian memasukkan ke persamaan untuk mendapatkan nilai sudut azimuth dan elevasi dengan ketentuan seperti pada umumnya yaitu untuk azimuth bernilai 0.00 s/d 359.99 dan elevasi bernilai 0.00 s/d 90.00.
Persamaan yang digunakan untuk mendapatkan nilai sudut Azimuth adalah :
Sudut=atan2(sin(lon2-lon1)*cos(lat2), cos(lat1)*sin(lat2)-sin(lat1)*cos(lat2)*cos(lon2-lon1));
Azimuth=Sudut*180/Phi; ——–> (Phi = 3.14159)
Persamaan yang digunakan untuk mendapatkan nilai sudut elevasi :
dLat = (lat2-lat1);
dLon = (lon2-lon1);
Sudut = sin(dLat/2) * sin(dLat/2) + sin(dLon/2) * sin(dLon/2) * cos(lat1) * cos(lat2);
x = 2* asin(sqrt(Sudut));
y = 6371000 * x; ———> (6371000 = Jari-jari bumi ; Sumber Wikipedia  )
)
Elevasi=atan(alt/y);
Elevasi=Elevasi*360/(2*Phi);
Nah, dari 2 persamaan di atas akan didapatkan sudut Azimuth dan Elevasi. sekarang untuk menggerakkan Servo atau aktuator Mekanis antenna dibutuhkan persamaan untuk mengarahkan Putaran (jika dibutuhkan fungsi reverse) dan menyesuaikan resolusi sudut agar hasil track lebih presisi. berikut persamaan sederhananya : (diturunkan sesuai kebutuhan).
X=x/(b-a)*(d-c)+c;
Blok sistem TX dan RX :
Blok sistem TX
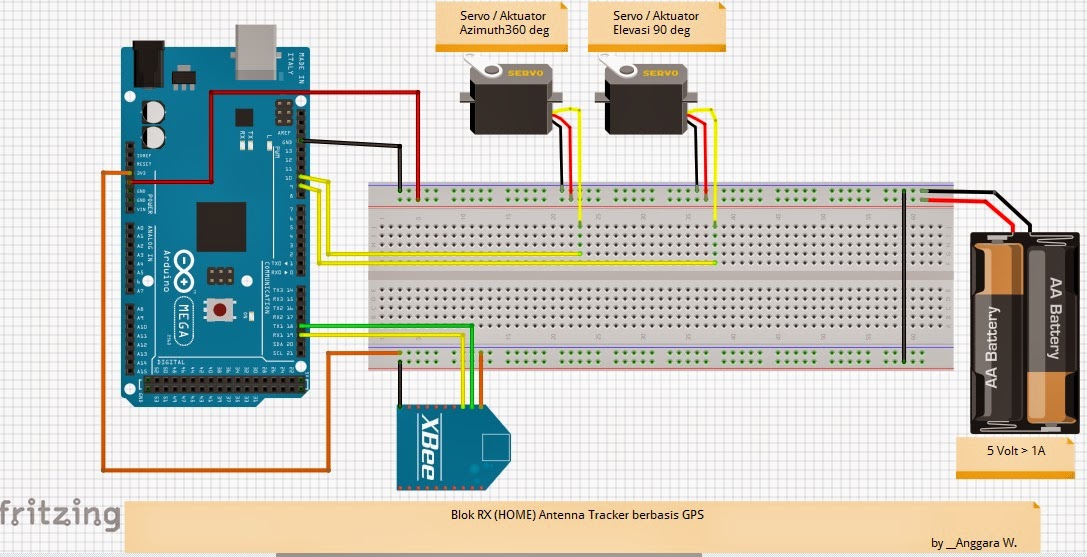
Blok sistem RX (Home)
Berikut foto prototipe alat :
Bagian TX dan RF Module untuk mengirim data dari receiver GPS ke ground.
Bagian RX dan RF Module untuk menerima data (home).
TX (kiri) & RX (kanan).